 Engenharia automobilĂstica atuando para criar suspensĂ”es com dirigibilidade superior e ao mesmo tempo confortĂĄveis. Engenharia automobilĂstica atuando para criar suspensĂ”es com dirigibilidade superior e ao mesmo tempo confortĂĄveis.
Nos primĂłrdios da era automobilĂstica as rodas eram montadas em eixos rĂgidos ligados diretamente Ă carroceria. As rodas foram posicionadas com cĂąmber positivo, dado pelo prĂłprio eixo, de modo a manter o cubo de roda bem apoiado na ponta de eixo, e tambĂ©m para que os raios trabalhassem em posição vertical quando do carregamento do veĂculo. O estudo da dinĂąmica veicular se tornou mais necessĂĄrio desde o momento em que carroceria e eixos foram separados e ligados elasticamente por uma âdupla dinĂąmicaâ: molas â para suportar o peso do veĂculo e absorver as irregularidades â e amortecedores â para conter as oscilaçÔes da carroceria e das rodas, alĂ©m de isolar das vibraçÔes induzidas pelas irregularidades do solo. Estes dois elementos dissipam energia na forma de calor para minimizar as movimentaçÔes. EquilĂbrio em movimento  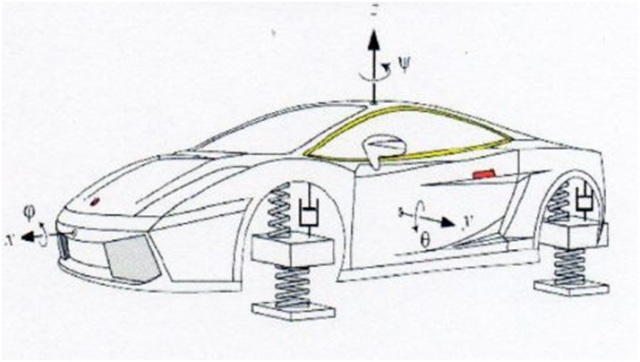  Diagrama de suspensĂŁo convencional para estudo do sistema massa-mola-amortecedor. Pneus sĂŁo considerados como molas de ar comprimido (Arte: Dutra / Universidade TecnolĂłgica do ParanĂĄ)  Diagrama de suspensĂŁo convencional para estudo do sistema massa-mola-amortecedor. Pneus sĂŁo considerados como molas de ar comprimido (Arte: Dutra / Universidade TecnolĂłgica do ParanĂĄ)
Enquanto eixos e carroceria eram solidamente ligados, a estabilidade dependia basicamente do centro de gravidade. Com a separação, surgiram a massa suspensa (carroceria e chassis) e a massa nĂŁo suspensa (suspensĂŁo e rodas) formando um novo sistema Ășnico e nĂŁo mais tĂŁo equilibrado e estĂĄvel. Ă certo que a pretensĂŁo inicial foi alcançada, pois o conforto aumentou; a frequĂȘncia das vibraçÔes transmitidas aos ocupantes diminuiu muito. Todavia, as oscilaçÔes com maiores amplitudes verticais geraram outro desconforto, o movimento excessivo nem sempre bem controlado pelos amortecedores. A força de reação de uma mola Ă© função direta do curso de suas extremidades, ou seja, posição relativa entre roda e carroceria. JĂĄ no amortecedor, a força de reação Ă© uma função complexa da velocidade com que as extremidades sĂŁo aproximadas e separadas; essa força aumenta de maneira crescente. Como massa suspensa e massa nĂŁo suspensa tĂȘm valores quantitativos bem diferentes, elas reagem de forma diferente Ă s irregularidades. Suas frequĂȘncias naturais sĂŁo bem distintas, porĂ©m proporcionais. Estas diferenças, por si sĂł, dificultam o casamento perfeito das forças de reação de mola e amortecedor, de modo a obter controle total para todas as condiçÔes operacionais a que estĂĄ exposta a suspensĂŁo. Desenvolver a calibração desses elementos da suspensĂŁo com curvas de forças fixas Ă© interessante, porĂ©m trabalhoso e consegue, no mĂĄximo, um compromisso para o pĂșblico-alvo do veĂculo. Agrada Ă mĂ©dia. DĂ©cadas de evolução AtĂ© o inĂcio dos anos 1920, as suspensĂ”es eram, literalmente, de carroça. Os veĂculos nĂŁo passavam de carruagens a motor. Dessa Ă©poca atĂ© meados dos anos 1950 ocorreu uma intensa diversificação dos sistemas, motivada principalmente pela adoção de borracha para aumentar a aderĂȘncia entre roda (pneu) e solo, e pelo estudo de geometria da suspensĂŁo dianteira. As suspensĂ”es tradicionais buscavam, como atĂ© hoje, compatibilizar a dualidade maciez-estabilidade por meio do estudo de geometria, cinemĂĄtica (pontos de fixação dos componentes), suas formas e materiais, isoladamente ou como um todo. O objetivo era, como ainda Ă©, dar maior controle direcional, estabilidade e conforto de marcha, alĂ©m de desgaste menor e mais regular dos pneus, de maneira a minimizar a variação da força de contato deste com o solo em qualquer condição. Por sua vez, a produção em sĂ©rie exigiu novos conceitos de confiabilidade, custo (produção em larga escala), montagem e manutenção, obrigando a padronização de sistemas.    JĂĄ no inĂcio da industrialização procurava-se melhor desempenho da suspensĂŁo. Aqui a do Ford modelo T (Foto: Flickr.com)  JĂĄ no inĂcio da industrialização procurava-se melhor desempenho da suspensĂŁo. Aqui a do Ford modelo T (Foto: Flickr.com)
 No entanto, desde o princĂpio era perceptĂvel que configuraçÔes fixas de molas e amortecedores nĂŁo atendiam por inteiro os anseios dos ocupantes do veĂculo. Iniciaram-se os anos 1960 e era necessĂĄrio interferir com alguma ação externa nas forças de reação das molas e amortecedores procurando adequar a suspensĂŁo Ă s mais diversas condiçÔes de carga, velocidade, tipo de uso, piso, etc. Multiplicaram-se as opçÔes de mecanismos para alteração ou mesmo substituição por outros mecanismos atuadores para executar a mesma função, mas com opção de variação. Desde um simples botĂŁo de regulagens nos amortecedores Ă troca das molas por bolsĂ”es hidropneumĂĄticos controlados por vĂĄlvulas mecĂąnicas, as suspensĂ”es começaram a dispor de concepçÔes mecĂąnicas diversas e variĂĄveis. Entretanto, eram passivas e sofriam de certa lerdeza inercial nĂŁo compatĂvel com a velocidade que as condiçÔes de uso exigiam. A dĂ©cada de 1980 ofereceu novos recursos tecnolĂłgicos com a evolução da eletrĂŽnica. Possibilitou o gerenciamento computadorizado naqueles e em novos sistemas mecĂąnicos, propiciando maior velocidade de resposta, alĂ©m de praticamente dispensar a ação humana. A partir daĂ, houve uma bifurcação tecnolĂłgica que existe atĂ© os dias de hoje. As suspensĂ”es convencionais, mais baratas e elementares pelo exposto acima, seguiram caminhos cada vez mais apurados e precisos nos elementos e na geometria. SĂŁo utilizadas em larga escala e nĂŁo sĂł nos veĂculos menos sofisticados.    Conjuntos convencionais sĂŁo eficientes e amplamente utilizados para redução de custo na indĂșstria (Foto: minhaoficina.com.br)  Conjuntos convencionais sĂŁo eficientes e amplamente utilizados para redução de custo na indĂșstria (Foto: minhaoficina.com.br)
JĂĄ as adaptativas, por conta do aprimoramento eletrĂŽnico com mais capacidade e velocidade de processamento, padeciam de sistemas mecĂąnicos nĂŁo compatĂveis com este desempenho eletrĂŽnico. Sua evolução se deu e ainda se dĂĄ pelo melhor sensoriamento das caracterĂsticas desejadas, processamento rĂĄpido e ação em tempo real dos elementos modificĂĄveis da suspensĂŁo. Tornaram-se assim mais ativas e nĂŁo mais tĂŁo passĂveis da ação humana. 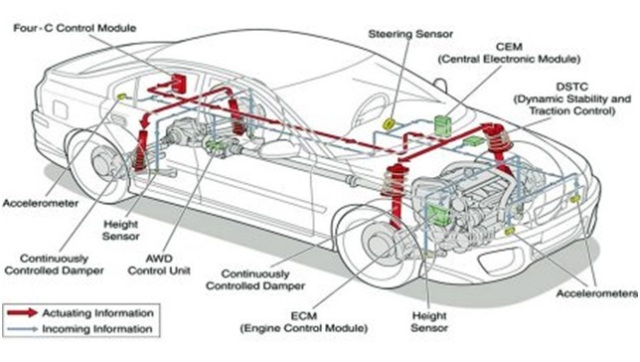  Mesmo com sensoriamento e atuadores variĂĄveis mais simples, as adaptativas semiativas sĂŁo mais eficazes (Arte: Ohlinsracing.com)  Mesmo com sensoriamento e atuadores variĂĄveis mais simples, as adaptativas semiativas sĂŁo mais eficazes (Arte: Ohlinsracing.com)
 Corpo humano e as vibraçÔes No perĂodo dos anos 1970, o estudo do fator humano e sua relação com sistemas vibratĂłrios (como os veĂculos) modificou o conceito de conforto veicular, aprimorou o de estabilidade e dirigibilidade e deu impulso a novas tecnologias tanto nas suspensĂ”es convencionais quanto nas adaptativas. HĂĄ muito se sabe que os efeitos de vibraçÔes e oscilaçÔes agindo diretamente no corpo humano, e indiretamente em seus ĂłrgĂŁos, causam desconfortos, cansaço e podem ser graves a ponto de causar danos fĂsicos. JĂĄ tratei desse tema aqui nesta coluna no artigo Ăs do volante. Como tem massa muito menor que a massa suspensa, o corpo humano e seus ĂłrgĂŁos sĂŁo a parte mais sensĂvel e frĂĄgil do conjunto homem-mĂĄquina. Assim Ă© que, quanto mais neutra e parada a massa suspensa em qualquer situação em relação aos movimentos da nĂŁo suspensa, mais favorecidos serĂŁo os ocupantes. Esta Ă© a noção de conforto veicular. E a dirigibilidade? Deve ser a mĂĄxima possĂvel dada pela carroceria com mĂnimo movimento e pneus com o mĂĄximo de contato constante com o solo em qualquer manobra.   A suspensĂŁo McPherson convencional estĂĄ entre as de maior aplicação e sucesso na relação conforto-dirigibilidade (Arte: canaldapeca.com.br)  A suspensĂŁo McPherson convencional estĂĄ entre as de maior aplicação e sucesso na relação conforto-dirigibilidade (Arte: canaldapeca.com.br)
Efeitos, causas e açÔes O desenvolvimento das suspensĂ”es convencionais se dĂĄ em função dos efeitos e causas da reação dos seus componentes e as consequĂȘncias sentidas pelo usuĂĄrio. SĂŁo passivas, e nĂŁo se adaptam Ă s condiçÔes que encontram pela frente. Como exemplo, a situação em que repentinamente nos deparamos com um buraco daqueles capazes de estourar pneu e quebrar roda numa rodovia de boa qualidade, Ă noite. Neste tipo de suspensĂŁo, tudo depende de nossos instintos, experiĂȘncia e capacidade de reação. Nas suspensĂ”es adaptativas, os parĂąmetros dos componentes podem ser alterados em resposta (semiativas) ou em preparação (ativas) Ă s mudanças nas condiçÔes de condução e operação do veĂculo. Elas se adaptam nos quesitos predeterminados em seu projeto. A FĂłrmula 1 as introduziu nos anos 1980, mais exatamente pela equipe Lotus em 1987. A de maior sucesso, entretanto, foi a ativa da equipe Williams e que fez com que Ayrton Senna o chamasse de "carro de outro planeta".  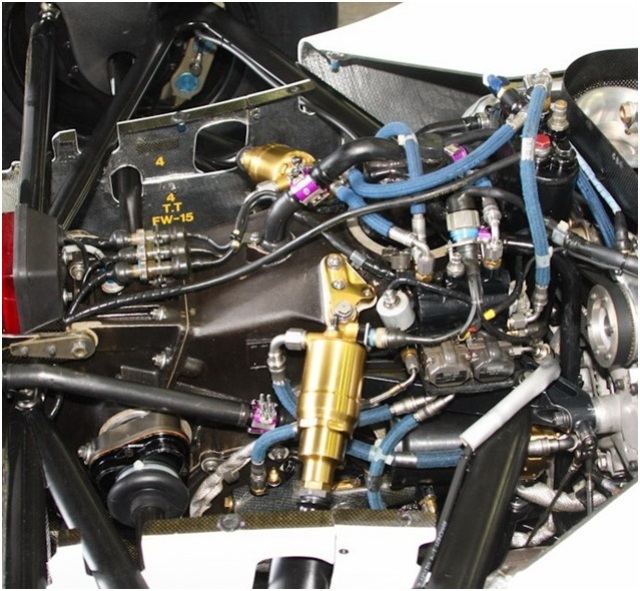  Williams FW-15: molas e amortecedores tradicionais de competição substituĂdos por vĂĄlvulas e atuadores pneumĂĄticos (Foto: startracingf1.com)  Williams FW-15: molas e amortecedores tradicionais de competição substituĂdos por vĂĄlvulas e atuadores pneumĂĄticos (Foto: startracingf1.com)
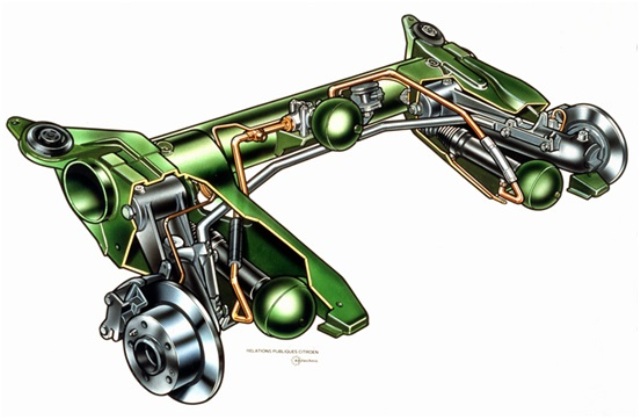
 Naquele exemplo, em função de nossas reaçÔes e dos sensores disponĂveis, a suspensĂŁo adaptativa semiativa se adaptaria imediatamente Ă mudança de piso, o buraco, minimizando o descontrole e desconforto. Por sua vez, a ativa se prepararia para atravessar a situação com o mĂnimo de impacto. Quanto maior a variação de condiçÔes de uso de um veĂculo, mais apropriado aplicar uma suspensĂŁo adaptativa. Se pudermos conseguir açÔes de a cada instante a melhor constante elĂĄstica de âmolaâ conjugado a melhor carga de âamortecedorâ, entĂŁo teremos otimização das relaçÔes custo-benefĂcio e conforto-dirigibilidade. O tripĂ© da inteligĂȘncia artificial Via sensoriamento e processamento eletrĂŽnico foi possĂvel dar âvidaâ ao sistema variĂĄvel e tornĂĄ-lo âinteligenteâ agindo diretamente sobre as causas e efeitos das movimentaçÔes transmitidas aos ocupantes. Surgiu um tripĂ© de componentes que lhe dĂŁo sustentação e permitem ação em loop coerente. Na primeira âpernaâ temos os mecanismos de ligação roda-carroceria; desde amortecedores e molas convencionais, mas com alguma forma de ajuste da constante elĂĄstica, atĂ© sistemas de atuadores eletro-hidrĂĄulicos ou hidropneumĂĄticos substituindo totalmente a âdupla dinĂąmicaâ. Estes mecanismos ganharam muito em velocidade de resposta e precisĂŁo ao longo das Ășltimas dĂ©cadas. A suspensĂŁo hidropneumĂĄtica ativa (Hydroactive) do CitroĂ«n Xantia de 1991 Ă© o primeiro exemplo de aplicação com longo tempo de existĂȘncia. 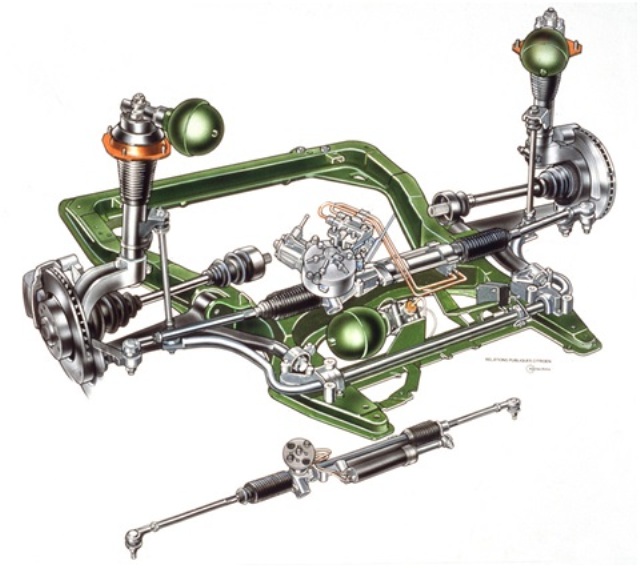  SuspensĂŁo Hydroactive dianteira (acima) e traseira (abaixo) utilizada nos veĂculos CitroĂ«n Xantia 1991. Atuadores hidropneumĂĄticos no lugar de molas e amortecedores. Note que a suspensĂŁo dianteira Ă© McPherson e a traseira, por braço arrastado (Arte: divulgação CitroĂ«n)  SuspensĂŁo Hydroactive dianteira (acima) e traseira (abaixo) utilizada nos veĂculos CitroĂ«n Xantia 1991. Atuadores hidropneumĂĄticos no lugar de molas e amortecedores. Note que a suspensĂŁo dianteira Ă© McPherson e a traseira, por braço arrastado (Arte: divulgação CitroĂ«n)
 Â Â
A segunda âpernaâ do tripĂ© visa substituir os excelentes, porĂ©m subjetivos, sentidos humanos. Sensores de parĂąmetros da dinĂąmica veicular e da relação do corpo humano com ela. ParĂąmetros estes sobre os quais se queira agir atravĂ©s de alteraçÔes no comportamento da suspensĂŁo. Inicialmente mecĂąnicos e em nĂșmero reduzido, transformaram-se em preciosidades eletrĂŽnicas na captação e medição de fenĂŽmenos da FĂsica tais como: massa, tempo, distĂąncia, ruĂdo, vibração, temperatura, etc. SĂŁo dos mais variados tipos de funcionamento â acĂșstico, magnĂ©tico, indutivo, tĂ©rmico, Ăłtico, radar, etc. â e devem transformar sinais eletromecĂąnicos em sinais elĂ©tricos com informaçÔes Ășteis. Hoje em dia, praticamente qualquer veĂculo, mesmo mais simples, tem vĂĄrios atuando em tempo integral. Qualquer um dos outros sistemas veiculares tem seus prĂłprios sensores e aplicação especĂfica. Exemplos? Alguns: cĂąmbio (trocas de marcha), direção (posição do volante), freios (ABS), motor (velocidade, rotação, injeção), carroceria (aproximação, distĂąncia, ponto cego, mudança de faixa) e por aĂ vai. 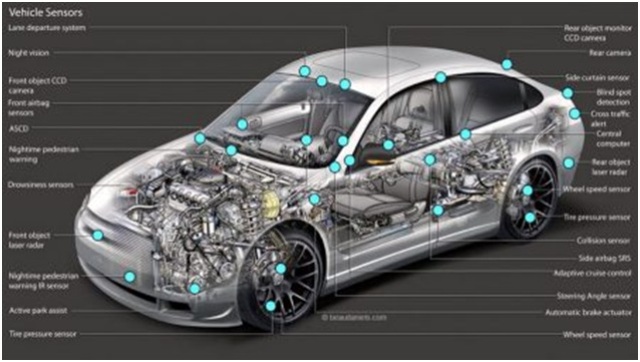  Mesmo num automĂłvel mais âcomumâ hĂĄ uma enorme diversificação e aplicação de sensores (Arte: Kampoulit.blogspot.com)  Mesmo num automĂłvel mais âcomumâ hĂĄ uma enorme diversificação e aplicação de sensores (Arte: Kampoulit.blogspot.com)
A terceira e essencial âpernaâ Ă© aquela que permite trabalhar com as necessidades e resultados das outras duas... e provendo o sistema de harmonia. Ă o mĂłdulo eletrĂŽnico com a central computadorizada de processamento de dados. Trata os sinais de entrada vindos dos sensores, processa informaçÔes atravĂ©s de comparaçÔes predeterminadas e envia sinais de saĂda com instruçÔes aos atuadores variĂĄveis da suspensĂŁo. Simples assim? Nem tanto! EstratĂ©gia de controle Com trĂȘs âpernasâ, torna-se imprescindĂvel que haja equilĂbrio. Neste caso, a base de apoio Ă© a estratĂ©gia de controle programada no mĂłdulo de processamento. Nela reside o fundamento de tĂ©cnica e tecnologia da suspensĂŁo adaptativa âinteligenteâ. Mas foi interessante como chegamos nisso e atĂ© passamos Ă frente.  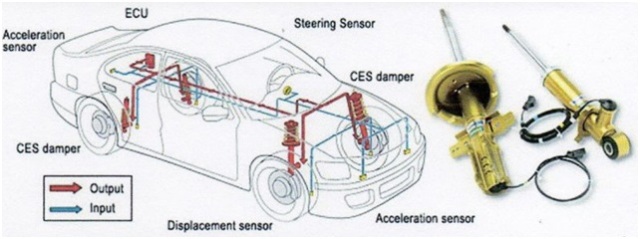  AtĂ© um tripĂ© simples com apenas amortecedores variĂĄveis necessita de unidade eletrĂŽnica de controle (Arte: divulgação Tenneco Monroe)  AtĂ© um tripĂ© simples com apenas amortecedores variĂĄveis necessita de unidade eletrĂŽnica de controle (Arte: divulgação Tenneco Monroe)
A acirrada competitividade na indĂșstria automobilĂstica gerou ampliação nas engenharias. Hoje em dia, praticamente nĂŁo hĂĄ mais generalistas dada a capilarização das especificidades de cada projeto na arquitetura de um veĂculo. Temos muito mais especialistas em cada sistema veicular. Os desenvolvimentos correm em paralelo, provocando o surgimento de tripĂ©s especĂficos para cada um dos inĂșmeros sistemas e subsistemas de um veĂculo. A complexidade cresceu sobremaneira. HĂĄ no mĂnimo um ou mais tripĂ©s para cada sistema. Um para freios, um para direção, um para transmissĂŁo, um para direção, um para carroceria, um para entretenimento e assim por diante, e, claro, um para suspensĂŁo.    Os veĂculos comerciais tambĂ©m dispĂ”em de sistemas adaptativos controlados eletronicamente, como este pneumĂĄtico, principalmente para cargas sensĂveis (Arte: blog do caminhoneiro)  Os veĂculos comerciais tambĂ©m dispĂ”em de sistemas adaptativos controlados eletronicamente, como este pneumĂĄtico, principalmente para cargas sensĂveis (Arte: blog do caminhoneiro)
 VeĂculos mais sofisticados tĂȘm dezenas de mĂłdulos de controle eletrĂŽnico e quilĂŽmetros de fiação elĂ©trica que jĂĄ começa a ser trocada por fibra Ăłtica. A grande sacada foi integrar todos esses mĂłdulos numa sĂł ECU â Electronic Control Unit (Unidade de Controle EletrĂŽnico) atravĂ©s de linguagens como a CAN â Controller Area Network (Rede de Controle de Ărea), tratar os sinais de todos os sensores disponĂveis e aplicar em um dado sistema, mesmo que aqueles sensor e mĂłdulo nĂŁo estejam relacionados a esse sistema. AliĂĄs, foi no aproveitamento dos sinais de sensores jĂĄ disponĂveis nos diversos sistemas dos veĂculos, e integrando-os entre si, que a evolução da suspensĂŁo adaptativa se tornou exponencial. Ideias, imaginação e a necessidade dos engenheiros e consumidores se encarregaram de acrescentar outros tantos mais ao veĂculo. Hoje sĂŁo centenas num sĂł veĂculo. Esta Ă© a estratĂ©gia e a real âinteligĂȘnciaâ dos veĂculos atuais. Isto permite que os diversos sistemas âconversemâ entre si. Exemplo: um sensor de estacionamento (aproximação, na carroceria) avisa que Ă© necessĂĄrio alterar a constante das molas e as cargas dos amortecedores, pois a velocidade (outro sensor) do veĂculo na estrada Ă© alta para a situação e indica que Ă© necessĂĄrio acelerar. Basta criar uma estratĂ©gia de controle para isso, utilizando o que jĂĄ estĂĄ disponĂvel, e introduzi-la na configuração do mĂłdulo central. O tripĂ© pode atĂ© ser chamado de inteligente, e dĂĄ para considerar que Ă©; mas sĂŁo da engenhosidade humana a estratĂ©gia e o controle. MĂĄrio Pinheiro Â
| 

